Introduction
In the realm of robotics, the demand for high-performance, compact electric motors has never been higher. As robots take on increasingly complex tasks across industries, their actuators must deliver exceptional torque density, wide speed ranges, and precise control dynamics. Among PMSM topologies, spoke-type configurations have garnered significant attention due to their unique advantages. These motors feature a rotor with radially magnetized permanent magnet (PM) segments arranged like spokes around a central hub. This blog will explore the design process of a 24-slot, 20-pole spoke PMSM using EMWORKS' MotorWizard software, a powerful suite of tools tailored for PMSM design and analysis.
Design Challenges of Spoke PMSMs
While spoke PMSMs offer compelling advantages, their design and optimization present unique challenges that must be carefully addressed:
Magnet Flux Leakage: The segmented PM arrangement in spoke rotors can lead to increased flux leakage, reducing the effective air-gap flux density and torque production. Careful shaping of the PM segments and rotor barriers is crucial to mitigate leakage and maximize flux concentration.
Stator Core Saturation: The high magnetic loading and saliency of spoke PMSMs can result in localized saturation in the stator teeth and yoke regions, leading to non-linear behaviour, increased losses, and potential demagnetization risks. Optimizing the stator geometry and selecting appropriate lamination materials are essential to prevent excessive saturation.
Torque Ripple: Due to their salient nature, spoke PMSMs can exhibit significant torque ripple, which can degrade control precision and introduce undesirable vibrations. Minimizing torque ripple requires careful consideration of winding configurations, skewing techniques, and rotor/stator geometry optimization.
Cogging Torque: The interaction between the PM fields and stator slot openings can lead to cogging torque, which impairs smooth operation and positioning accuracy. Techniques such as skewing, slot opening adjustments, and rotor/stator pole count selections can help mitigate cogging torque.
Addressing these challenges requires a comprehensive design approach that integrates advanced electromagnetic simulations with intelligent optimization algorithms. EMWORKS' MotorWizard software provides a holistic environment to tackle these complexities, enabling designers to explore and refine spoke PMSM configurations efficiently.
Simulation Using EMWORKS MotorWizard Software
EMWORKS' MotorWizard is a powerful suite of tools that streamlines the design and analysis of various motor topologies, including spoke PMSMs. Let's walk through the process of designing a 24-slot, 20-pole spoke PMSM for a robotic application using MotorWizard.
 |  |  |
| Fig. 1 (a). Spoke-type PM Design with 24 slots and 20 poles | Fig. 1 (b). 2D Geometry with Winding Pattern | Fig. 1 (c). 3D Geometry and 2D Geometry with Automatic Meshing |
3.1. Design Setup
We begin by creating a new project in MotorWizard and defining the basic motor specifications, such as the outer diameter, stack length, and target performance metrics like rated torque and speed. Next, we select the spoke PM rotor topology and specify key parameters like the number of poles, spoke count, and PM material properties. MotorWizard's intuitive interface allows us to configure the rotor geometry, ensuring manufacturability constraints like minimum rib thicknesses are satisfied from the outset.

Fig. 2. Model Settings
3.2. Stator and Rotor Design
The stator design phase is crucial for spoke PMSMs, as winding layout, slot/pole counts, and tooth geometries profoundly influence performance and efficiency. MotorWizard's Smart Design Modules aid in this process by rapidly exploring viable stator configurations based on our performance targets. Once high-potential stator candidates are identified, we can fine-tune granular parameters like tooth widths and winding layouts, leveraging MotorWizard's advanced optimization algorithms.
 |  |
| Fig. 3. Stator Settings | Fig. 4. Rotor Settings |

Fig. 5. Winding Settings

Fig. 6. Magnetization pattern of Spoke-type Permanent Magnets
3.3. On-Load Analysis
On-load analysis is a critical phase in motor system development, especially in robotics where performance is key. Using advanced simulations like MotorWizard, engineers can thoroughly assess how motors perform under different loads, ensuring they meet application requirements.

Fig. 7. Current Excitation Waveform
Torque: One important aspect we look at is torque production, which measures how much rotational force the motor can generate. For example, in recent tests at a steady 25 A RMS current, the motor consistently produced an average torque of 104 Nm, surpassing our target and proving its strength for the robotic task at hand.

Fig. 8. Electromagnetic Torque at 25 A RMS Current Excitation
Flux Linkage: We also analyze flux linkage, which shows how well the motor's magnetic field couples with its electrical circuit. This is crucial for robotics, where precise and fast movements are needed. Recent evaluations showed an On-Load Flux Linkage of 0.8 weber, indicating good magnetic coupling across various speeds.

Fig. 9. On-Load Flux Linkage Waveform
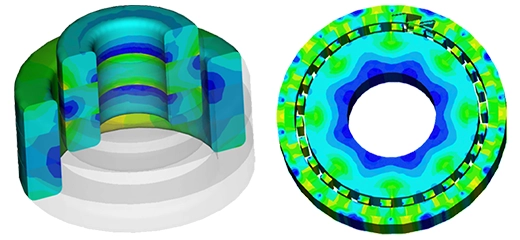
Additionally, we examine on-load magnetic flux density to understand how the magnetic field distributes within the motor. This helps us ensure operational efficiency and prevent saturation effects. Overall, MotorWizard simulations give us deep insights into motor behaviour under load, allowing us to fine-tune designs to meet the rigorous demands of robotics applications.

Fig. 10. On-Load Magnetic Flux Density
In a spoke-type PMSM, the self-inductance of each phase and the mutual inductance between phases play crucial roles in determining the motor's electrical characteristics and performance. Accurately calculating these inductance parameters typically involves detailed electromagnetic modelling and simulation, considering the geometric and material properties of the motor's components.

Fig. 11. Multiple Plot View of the Self and Mutual Inductance for all the Phases
3.4. No-Load Analysis
No-load analysis is another vital aspect of motor evaluation facilitated by MotorWizard, allowing us to delve into critical performance metrics that influence the motor's behavior when not under load.
Back EMF: One such metric we examine is the back electromotive force (EMF) waveform. This waveform serves as a pivotal indicator of the motor's voltage constant, providing insights into its potential for high-speed operation—a necessity for robotic systems requiring agile motion control. For instance, recent analysis revealed a peak back EMF voltage of 318 volts, indicating the motor's capability for swift and efficient operation even at high speeds.

Fig. 12. Phase Back-EMF Waveform
Cogging Torque: Another crucial parameter analyzed during the no-load assessment is cogging torque. Cogging torque refers to the undesirable pulsating torque experienced by the motor when rotating under no-load conditions. Minimizing cogging torque is imperative for achieving smooth operation and precise positioning, both of which are indispensable for robotic applications demanding accuracy and reliability. Leveraging MotorWizard's advanced simulations, engineers can pinpoint sources of cogging torque and implement targeted mitigation strategies such as skewing and slot opening adjustments. Recent simulations yielded a peak cogging torque of 0.24 Nm, underscoring the effectiveness of these techniques in enhancing motor performance and minimizing undesirable torque fluctuations.

Fig. 13. Cogging Torque Waveform
Furthermore, the examination of no-load magnetic flux density provides valuable insights into the distribution and intensity of the magnetic field within the motor when operating without a load. This analysis aids in optimizing motor design to ensure efficient operation and prevent saturation effects, thereby enhancing overall performance and reliability.

Fig. 14. No-Load Magnetic Flux Density
In summary, no-load analysis using MotorWizard empowers engineers to assess critical performance metrics such as back EMF and cogging torque, enabling the refinement of motor designs to meet the stringent requirements of robotic applications.
Spoke PMSMs represent a cutting-edge solution for robotic applications demanding extreme torque densities and dynamic performance in compact packages. Through the design process outlined in this blog, we demonstrated how MotorWizard streamlines the creation of a high-performance 24-slot, 20-pole spoke PMSM tailored for robotic applications. From project setup and rotor design to stator optimization, and on-load and no-load analysis, MotorWizard's comprehensive capabilities enable designers to deliver cutting-edge solutions that meet the demanding requirements of robotics.
As the robotics industry continues to push the boundaries of actuator performance, innovative motor topologies like spoke PMSMs, combined with advanced design tools like MotorWizard, will play a pivotal role in enabling the next generation of robots.