Einführung
Magnetische Aktuatoren basieren auf einem elektromagnetischen Feld, um elektrische Energie in mechanische Energie umzuwandeln. Abhängig von der Art der erzeugten Bewegung; Bei elektromagnetischen Antrieben mit linearer oder rotatorischer Bewegung werden zwei Kategorien unterschieden: rotatorischer und linearer Antrieb.
Unter den Anwendungen von Gleichstromaktoren finden wir die elektromagnetischen Schütze, die auf linearer Bewegung basieren. Sie werden häufig zum Herstellen und Unterbrechen von Verbindungen als Schaltgeräte für elektrische Energiequellen verwendet. Sie bestehen in der Regel aus Permanentmagneten, Magnetspulen und ferromagnetischen Teilen.
In vielen industriellen Anwendungen ist die energiesparende Leistung von Geräten oft ein sehr attraktiver Vorteil. Insbesondere ein neuer Typ eines elektronisch gesteuerten Gleichstromschützes in Verbindung mit einem Permanentmagneten hat in den letzten Jahren aufgrund seiner herausragenden Vorteile, wie der Energieeinsparung und der Geräuschfreiheit, immer mehr Aufmerksamkeit auf sich gezogen.
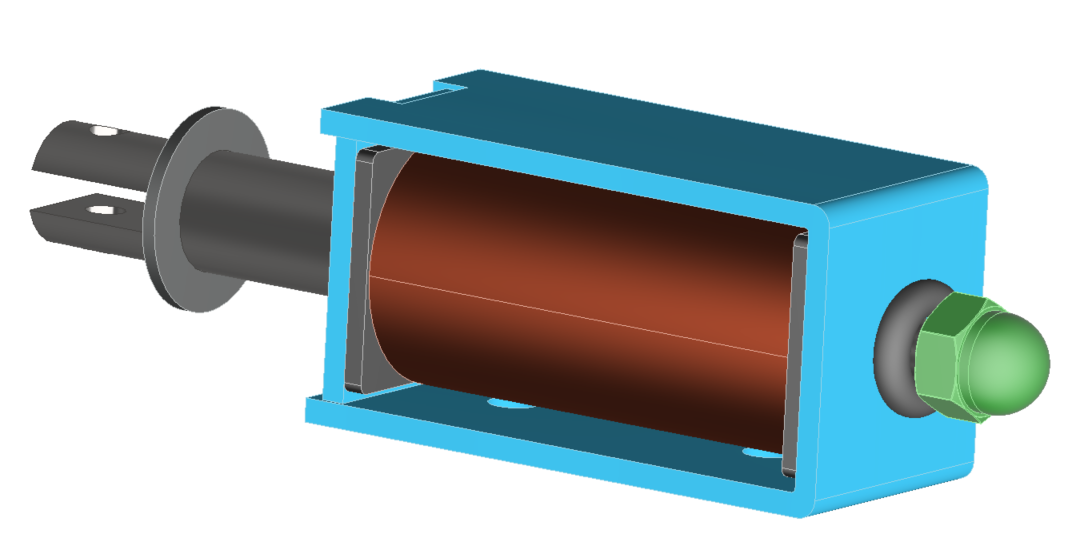
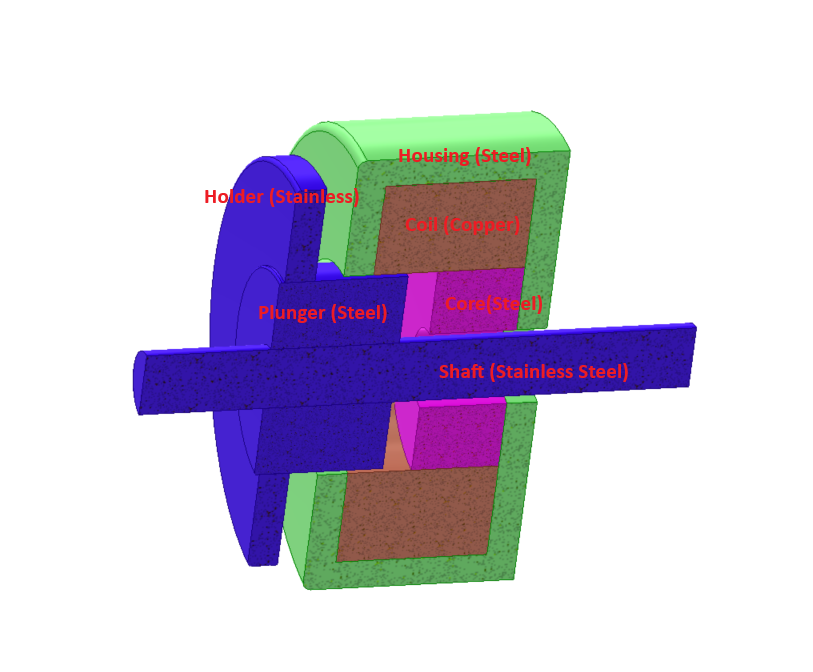
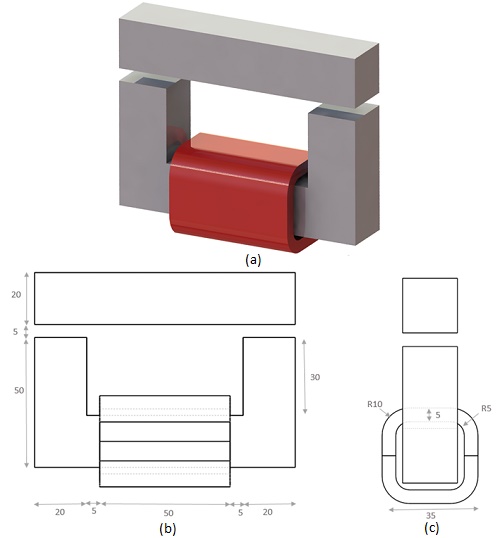
Das untersuchte Gleichstromschütz besteht aus drei Teilen: einem nichtlinearen ferromagnetischen Kern mit zwei beweglichen und festen Teilen, die durch eine Gleichstromkupferspule erregt werden (siehe Abbildung 1).
Problembeschreibung
Material | Dichte ( | Magnetische Permeabilität | Elektrische Leitfähigkeit (S/m) | Wärmeleitfähigkeit (W/mK) | Spezifische Wärmekapazität (J/Kg.K) |
| Kupfer (Cu) | 8900 | 0,99 | 6 E + 07 | 385 | 390 |
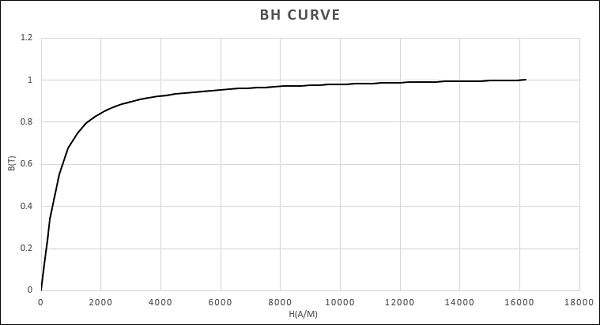
Die entsprechende BH-Kurve wird durch das nächste 2D-Diagramm definiert:
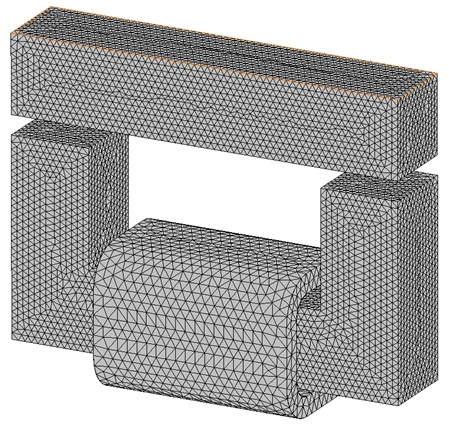
Die Netzqualität ist für jede FEM-Simulation von entscheidender Bedeutung. Die Ergebnisgenauigkeit und die Lösungszeit hängen stark von der Maschenweite ab. Mit EMS kann der Benutzer die Maschengröße von Volumenkörpern und Flächen über die Netzsteuerungsfunktion steuern. In diesem Beispiel ein feinmaschiges Steuerelement
Wurde für genauere Ergebnisse auf unser untersuchtes Modell angewendet.
Ergebnisse
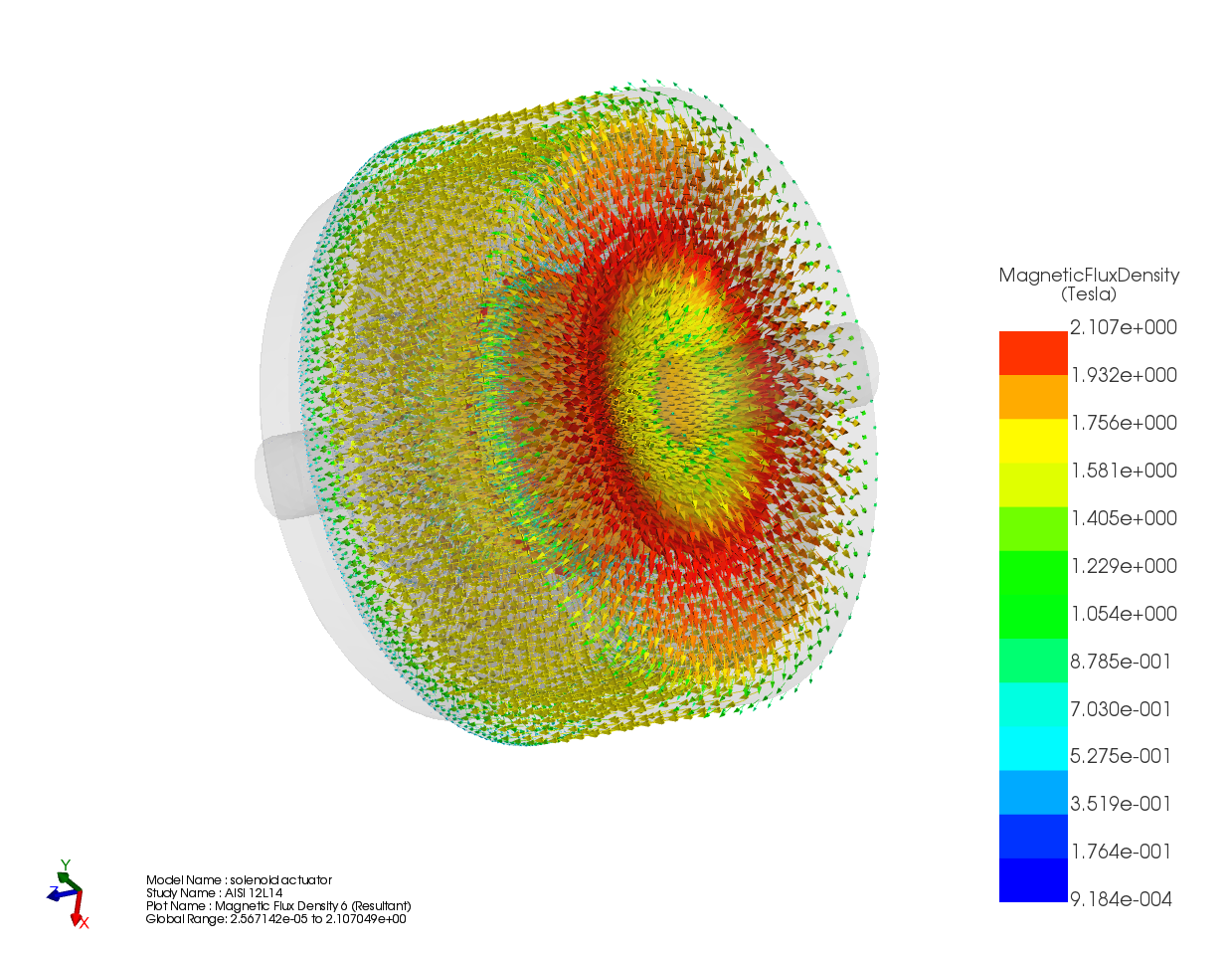
Das Arbeitsprinzip des Magnetschützes besteht darin, einen Gleichstrom durch eine Multiturn-Spule zu leiten, die einen statischen Magnetfluss erzeugen kann. Die magnetische Flussdichte erzeugt eine konstante Magnetkraft auf den sich bewegenden Teil des ferromagnetischen Kerns. Die magnetostatische Simulation ergab die in den folgenden Abbildungen gezeigten Ergebnisse.1. Elektromagnetische Analyse
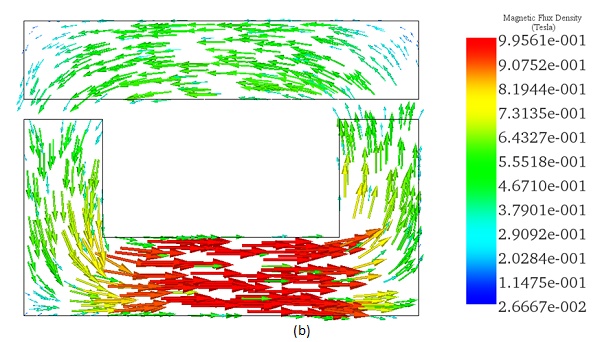
Die Verteilung der Flussdichte über den ferromagnetischen Kern für eine Stromerregung von 2A erreicht einen Maximalwert von 0,98 T, wie in Abbildung 5 gezeigt.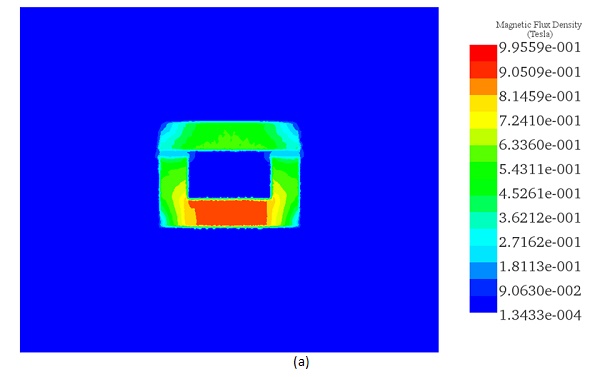
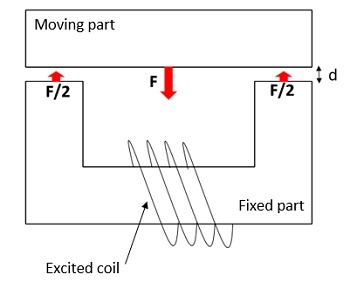
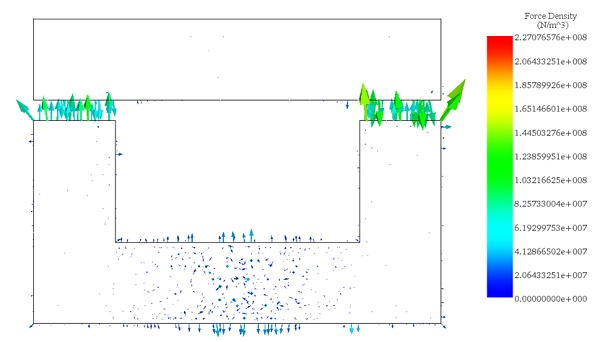
Die Magnetkraftverteilung über den Bereich zwischen dem beweglichen und dem festen Teil ist in Abbildung 6 dargestellt. Sie wird innerhalb von EMS durch eine virtuelle Arbeitsfunktion berechnet.
2.Elektromagnetische Analyse gekoppelt mit der SOLIDWORKS-Bewegung
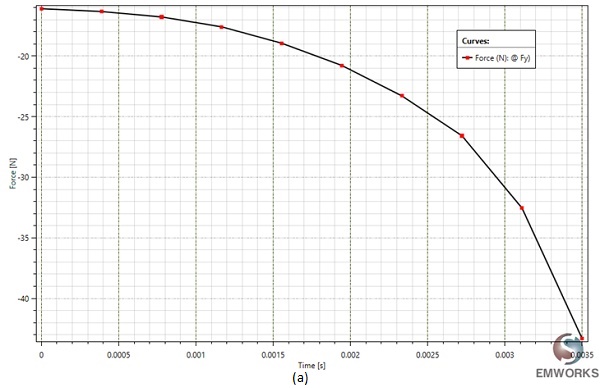
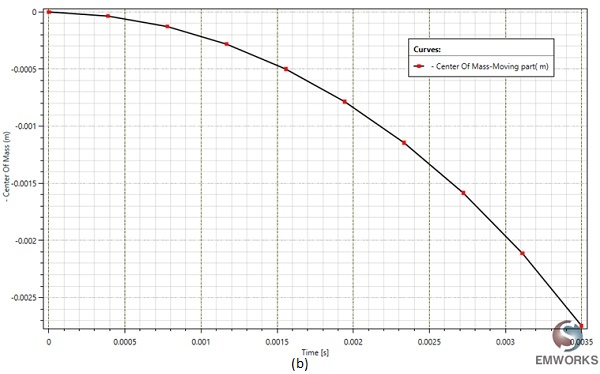
Durch die Kopplung des Magnetostatic-Moduls von EMS mit der Bewegung in SOLIDWORKS nutzt der Solver von SW Motion die berechnete Kraft und wandelt sie in eine mechanische Bewegung um. Es ermöglicht die Visualisierung der Veränderung der Position des sich bewegenden Teils in Abhängigkeit von der Zeit.Unter einer festen Stromerregung von 2A und nach t=3,5 ms ergab die Simulation die nächsten Ergebnisse. Die Variation der erzeugten Kraft und der Schwerpunktposition des sich bewegenden Teils gegenüber der Zeit sind in Fig. 7 angegeben. Diese Position gibt eine Vorstellung über die Variation des Luftspalts zwischen den beiden Teilen des Magnetschützes gegenüber der Zeit. Sie nimmt von d=5 mm auf d=2,3 mm ab.
Die momentane lineare Geschwindigkeit konnte durch SOLIDWORKS Bewegungsanalyse berechnet und durch die EMS-Ergebnistabelle visualisiert werden. Es hat einen Maximalwert von 1,77 m/s bei t=3,5 ms. Es wirkt proportional zur erzeugten Kraft.
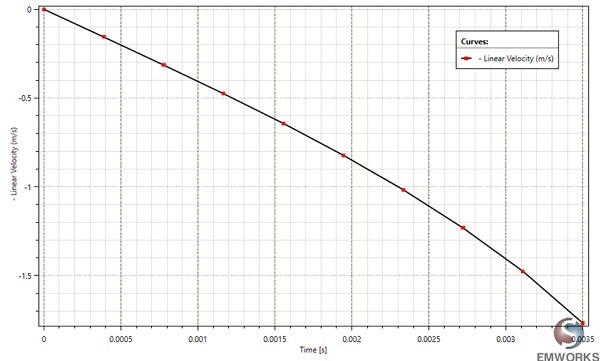
Abbildung 8 - Variation der Lineargeschwindigkeit über der Zeit.
3.Parametrische Analyse
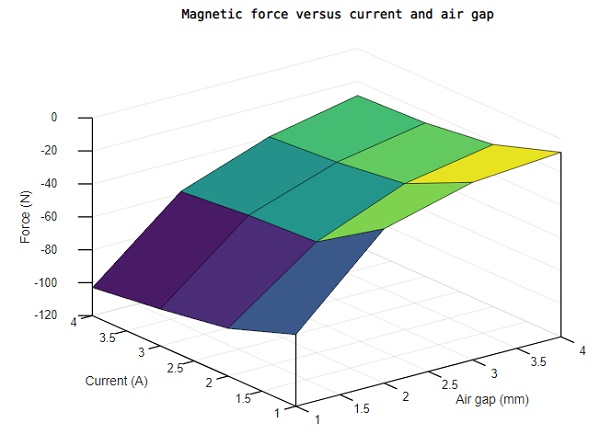
EMS ermöglicht die Analyse der verschiedenen Aspekte des untersuchten Elektromagneten durch Durchlaufen verschiedener Szenarien in einer einzigen Studie, indem sowohl Simulations- als auch geometrische Variablen parametrisiert werden.
Dieses Merkmal wird verwendet, um die erzeugte Kraft des untersuchten Schützes gegen die Stromerregung und den Luftspaltabstand zwischen den beiden Teilen zu berechnen.
Die ausgewählten Parametervariablen sind in der folgenden Tabelle aufgeführt:
| Szenarien | Luftspaltlänge (mm) | Strom (A) |
| Szenario 1 | 1 | 1 |
| Szenario 2 | 2 | 1 |
| Szenario 3 | 3 | 1 |
| Szenario 4 | 4 | 1 |
| Szenario 5 | 1 | 2 |
| Szenario 6 | 2 | 2 |
| Szenario 7 | 3 | 2 |
| Szenario 8 | 4 | 2 |
| Szenario 9 | 1 | 3 |
| Szenario 10 | 2 | 3 |
| Szenario 11 | 3 | 3 |
| Szenario 12 | 4 | 3 |
| Szenario 13 | 1 | 4 |
| Szenario 14 | 2 | 4 |
| Szenario 15 | 3 | 4 |
| Szenario 16 | 4 | 4 |
Durch Variation des Strom- und Luftspaltabstands berechnet und erzeugt EMS die Magnetkraft im oberen beweglichen Teil des Schützes. Abbildung 10 zeigt eine 3D-Darstellung der Kraftergebnisse. Die resultierende Kraft nimmt mit höherem Strom und kleinerem Spaltabstand zu.
Der untersuchte magnetische Aktuator weist bei geringem Stromverbrauch erhebliche Magnetkräfte auf, was diese Kategorie von Schaltern im Vergleich zu anderen herkömmlichen Typen populärer macht.
Fazit
Ein nicht lineares magnetostatisches Problem wurde unter Verwendung einer EMS-Simulationssoftware untersucht. Die Magnetkraft über ein Gleichstromschütz wurde gegen viele Stromerregungen und für verschiedene Luftspaltabstände berechnet.
Um das Design und den Wirkungsgrad solcher elektromagnetischer Aktuatoren zu optimieren, ist es dringend erforderlich, die erzeugten Magnetkräfte auszuwerten, um genauere Ergebnisse für verschiedene Szenarien der Schaltgeräte zu erzielen. Da die Zuverlässigkeit und Lebensdauer elektromagnetischer Schütze immer wichtiger werden, arbeiten die Hersteller jetzt an neuen Geräten mit elektronischer Steuerung, um Probleme im Zusammenhang mit Kontaktsprüngen, übermäßiger Erwärmung und sogar Kontaktschweißen zu vermeiden [2]. Dies ermöglicht es, den herkömmlichen elektromagnetischen Schützen sowohl Leistung als auch Zuverlässigkeit zu verleihen.
Verweise
[1]. Le Van, V., 2015. Développement de formulations intégrales de volume en magnétostatique (Doctoral dissertation, Université Grenoble Alpes).[2]. Perin, Arnaldo JosÉ. "An electronic control unit for reducing contact bounce in electromagnetic contactors." IEEE Transactions on Industrial Electronics 55.2 (2008): 861-870.