ブラシレスDCモーターとは?
ブラシレスDC電気モーター(BLDCモーター、BLモーター)(図1)は、電子整流モーター(ECM、ECモーター)としても知られていますが、統合されたインバーター/スイッチング電源を介してDC電源から電力を供給される同期モーターです。モーターを駆動するためのAC電気信号。これに関連して、交流、交流は正弦波を意味するのではなく、波形に制限のない双方向電流を意味します。追加のセンサーと電子機器は、インバーター出力の振幅と波形(したがって、DCバスの使用率/効率のパーセント)と周波数(つまり、ローター速度)を制御します。
効率は、BLDCモーターの基本性能を示します。ローターは磁石の唯一の支持体であるため、電力、つまり接続、整流子、ブラシは必要ありません。これらの代わりに、モーターは制御回路を採用しています。ローターがある場所を検出するために、BLDCモーターは、コントローラーとともに、ロータリーエンコーダーまたはホールセンサーを採用しています。
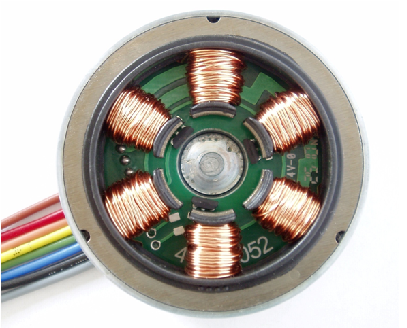
図1- BLDCモーター
応用 :
ブラシレスDCモーター(BLDC)は、産業制御、自動車、航空、自動化システム、ヘルスケア機器などの分野で、負荷の変化、一定の負荷、位置決めアプリケーションなど、さまざまなアプリケーション要件に使用されます。モーターは次のとおりです。
- コンピューターのハードドライブとDVD/CDプレーヤー
- 電気自動車、ハイブリッド車、電動自転車
- 産業用ロボット、CNC工作機械、および単純なベルト駆動システム
- 洗濯機、コンプレッサー、乾燥機
- ファン、ポンプ、送風機。
説明
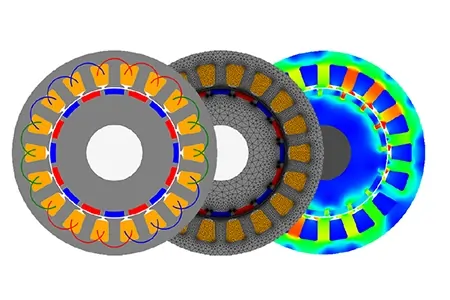
ここで検討しているモーターには、図2に示すように、8個の永久磁石と12コイルの固定子を含むローターがあります。ローターは、励磁コイルと永久磁石から生じる磁力によって回転します。複数のスタディを作成することにより、ユーザーは材料、ターン数、各ターンの電流、各パーツのジオメトリを変更できます。 EMSを使用すると、ユーザーは同じアセンブリファイルを保持し、各スタディを設計テーブルに関連付けることができます。これらの機能はすべて設計者にとって非常に役立ち、モーター性能を最適化するために変更する必要があるブラシレスDCモーターパラメーターを決定するために使用できます。
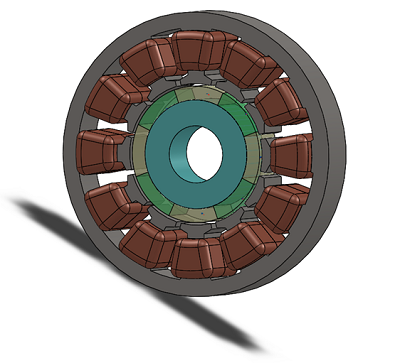
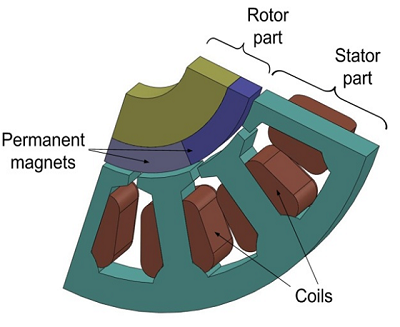
図2- BLDCの3Dモデル
調査
EMSの静磁気モジュールは、モーターの磁束と磁気強度を計算して視覚化するために使用されます。また、コイルのインダクタンスと負荷(ローター)にかかる電磁力の計算にも使用されます。 EMSで静磁気スタディを作成した後、4つの重要な手順を常に実行します。1-すべてのソリッドボディに適切な材料を適用する、2-必要な境界条件を適用する、またはいわゆるEMSの荷重/拘束、3-全体をメッシュするモデルと4-ソルバーを実行します。さらに、マグネティックススタディは熱に結合することができ、ユーザーにモーターの熱挙動についてのアイデアを与えることができます。
材料
EMSの静磁分析では、次の材料の特性が必要です(表1)。図4は、使用済み鋼のBH曲線を示しています。
| コンポーネント/ボディ | 材料 | 比透磁率 | 伝導率(S/m) | 熱伝導率(W/m * k) |
| ローター | AISI 1010スチール | 非線形 | 6.9e + 006 | 65.2 |
| 外気 | 空気 | 1 | 0 | 0.024 |
| 内気 | 空気 | 1 | 0 | 0.024 |
| コイル | 銅 | 0.99991 | 57e + 006 | 401 |
| 固定子 | AISI 1010スチール | 非線形 | 6.9e + 006 | 65.2 |
| 永久磁石 | S2818 | 1.0388 | 0 | 69 |
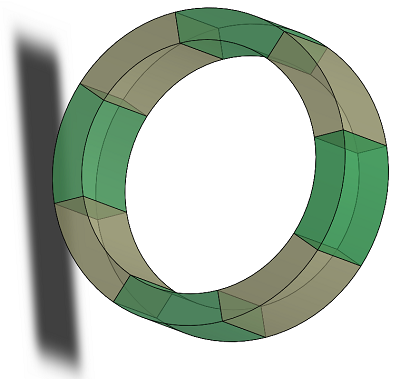
図3-ローターの永久磁石:保磁力:819647 A/m、残留磁気:1.07 T
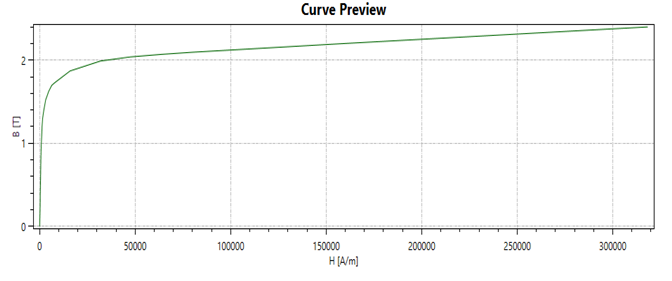
図4- AISI 1010スチールBH曲線
電磁入力
| 名前 | ターン数 | 電流励起 |
| 巻線コイル(1-8) | 200 | 1 A |
| 名前 | トルクセンター | コンポーネント/ボディ |
| バーチャルワーク | 原点で | ローターと永久磁石 |
メッシング
メッシュ品質は、メッシュコントロール(表4)を使用して調整できます。メッシュコントロールは、ソリッドボディと面に適用できます。以下(図6)は、メッシュコントロールを使用した後のメッシュモデルです。
| 名前 | 網目サイズ | コンポーネント/ボディ |
| メッシュコントロール1 | 1.200ミリメートル | コイル |
| メッシュコントロール2 | 7.000ミリメートル | ローター |
| メッシュコントロール3 | 1.000 mm | 磁石 |
| メッシュコントロール4 | 5.000ミリメートル | 固定子 |
| メッシュコントロール5 | 0.6699000 mm | 内気 |
表4-メッシュコントロール
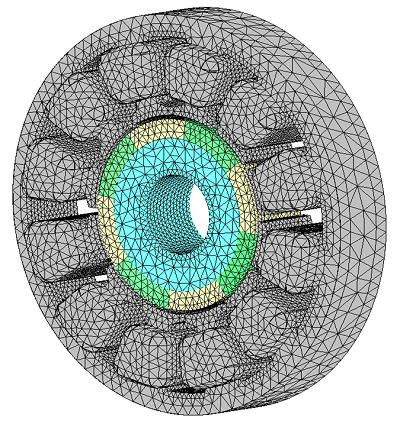
図4-メッシュモデル
結果
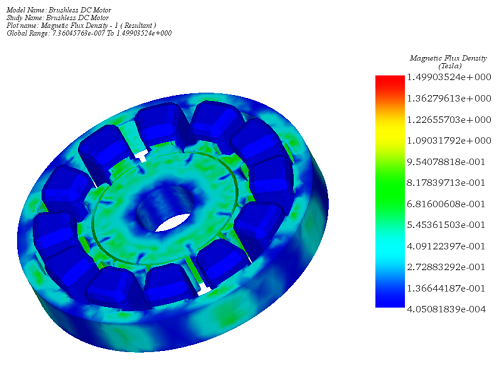
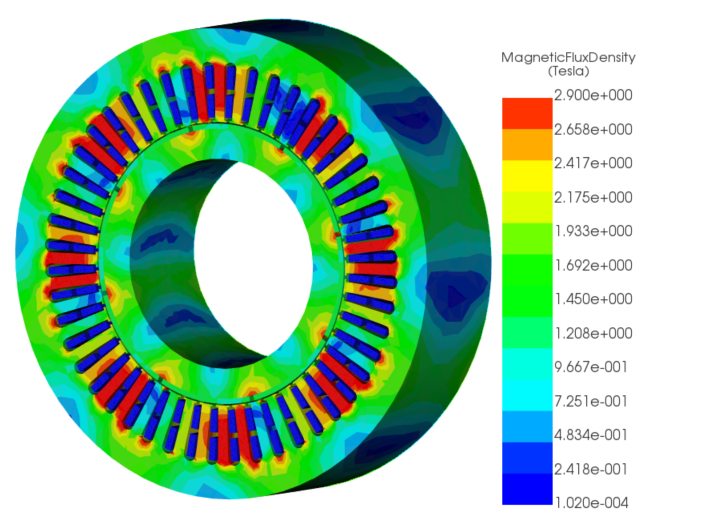
図5-磁束密度、フリンジプロット
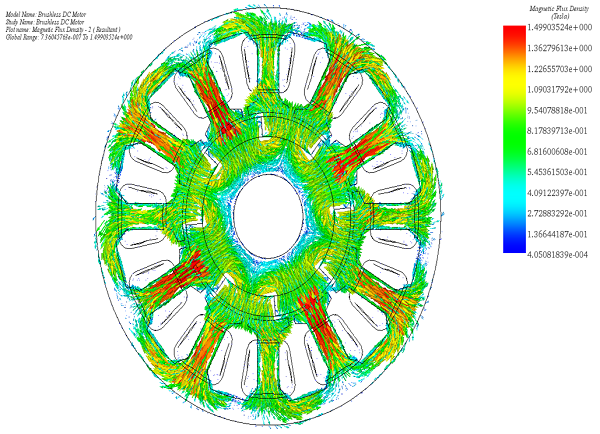
図6-磁束密度、ベクトルプロット
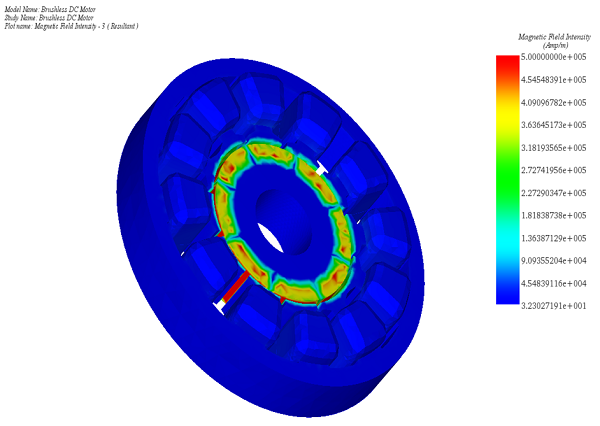
図7-磁場強度、フリンジプロット
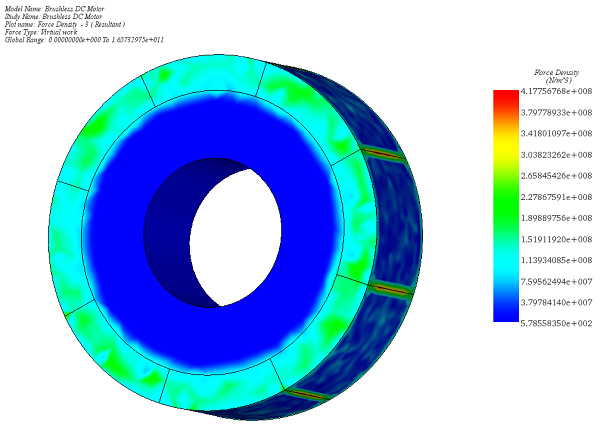
図8-磁石とローターの力密度
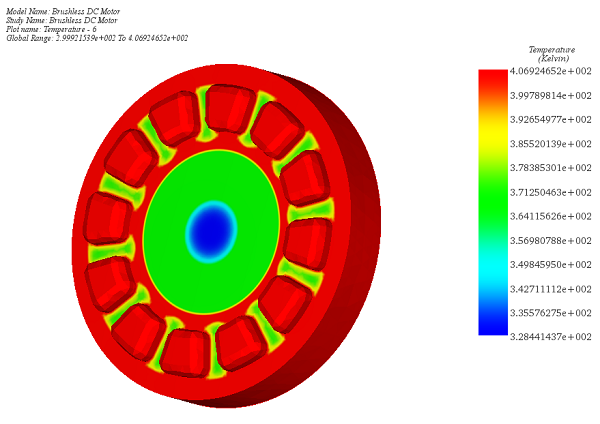
図9-内気のあるモーターの温度分布
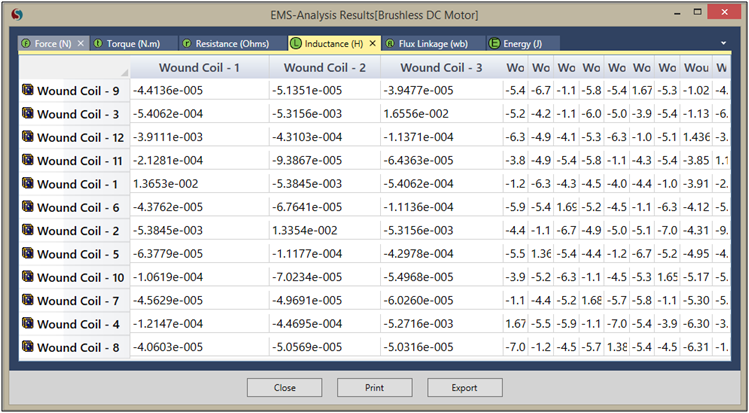
図10-結果テーブル