序章
永久磁石 (PM) モーターは、その電気的安定性、耐久性、および信頼性の高い性能のおかげで、何十年にもわたって電磁機械で使用されてきました。まだ主流ではありませんが、ハルバッハ配列に基づく電気モーターは、従来の表面実装型 PM 設計に比べて、出力密度の向上、トルク密度の向上、同量の PM 体積に対するより強力な磁場など、明らかな利点を提供します。ハルバッハ アレイ PM モーターは、航空宇宙、産業、家庭、再生可能、医療など、さまざまな市場部門でますます利用されています。
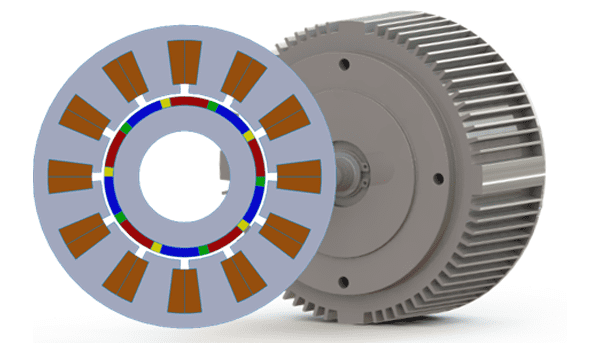
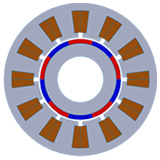
図 1- PM ハルバッハ アレイ モーター
磁石比率計算 (Rmp)
Rmp は、次のように、単一極の極ピッチ βmに対する、半径方向の PM 成分 βrの極弧の比率として定義されます。
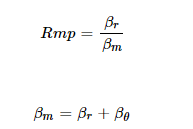
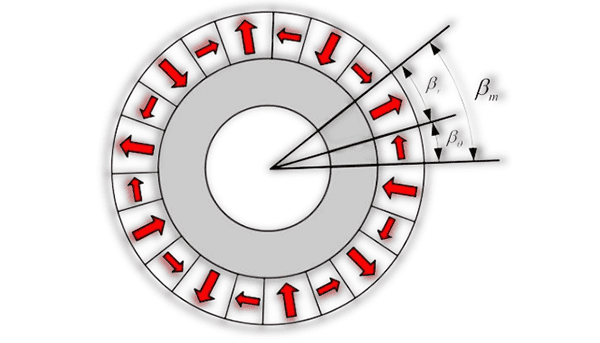
図 2a - PM Halbach アレイ構成
EMWorks2D ソリューション
回転運動と連成させた過渡磁気解析は、PM モーター設計のコギング トルク、無負荷、および負荷解析を解くために使用されます。 1、0.8、および 0.5 の Rmp の値に基づいて、この研究では 3 つの異なる PM 構成が提示されます。
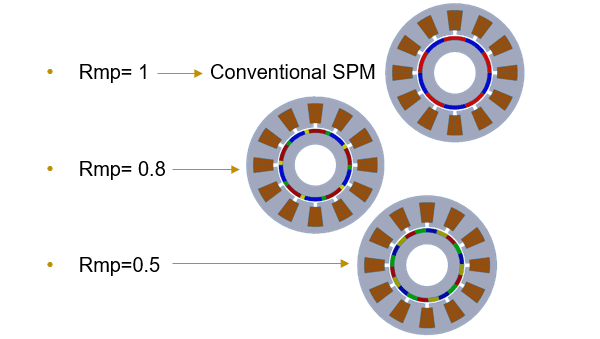
図 2b - Rmp=1、0.8、および 0.5 の PM ハルバッハ アレイ構成
設計仕様
次の表は、PM ハルバッハ配列モーターの主な設計仕様をまとめたものです。
| 設計パラメータ | 値 |
| 相数 | 3 |
| スロット数/極数 | 12/10 |
| 周波数 (Hz) | 50 |
| 基準速度(rpm) | 400 |
| コイル巻数 | 35 |
| エアギャップ長 (mm) | 1 |
シミュレーションと結果
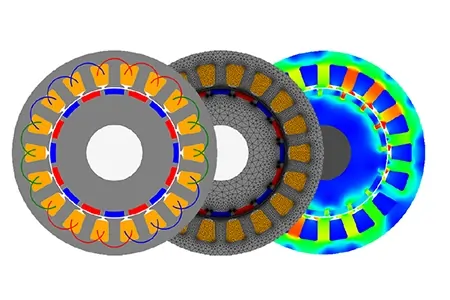
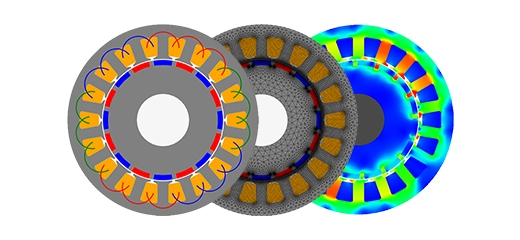
このセクションでは、EMWorks2D ソフトウェアを使用してさまざまな解析を実行し、3 つの PM 構成のマシンの性能を評価します。図 3 は、3 つのモーターの 2D CAD モデルを示しています。
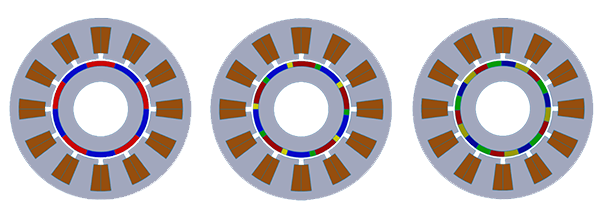
図 3- Rmp=1、0.8、および 0.5 の PM ハルバッハ アレイ モーター設計
コギングトルク解析
重要なモータ性能パラメータの 1 つであるコギング トルクは、無負荷解析で取得できます。次のプロットは、1 つの電気周期に対する 3 つの PM 構成のコギング トルク曲線を示しています。図 4 に示すように、従来の PM モータ設計 (非ハルバッハ) は、より小さな磁石比率のハルバッハの場合と比較して、より高いコギング トルクを生成します。
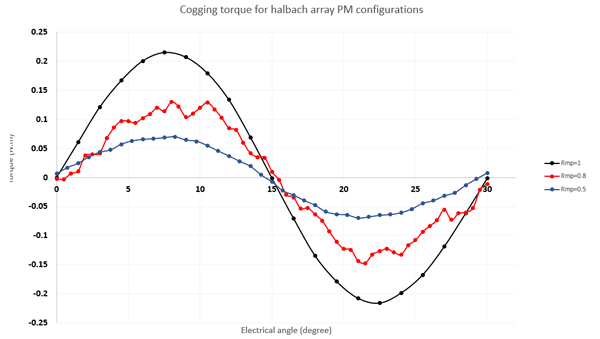
図 4 -電気角に対するコギング トルク
無負荷解析
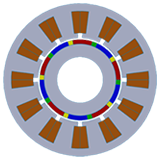
無負荷解析を使用して、逆起電力とマグネット コイルの鎖交磁束が 400 rpm の目的の基本速度で計算されます。図 5 は、磁束密度のベクトル プロットを使用して、各 PM 構成の磁化方向を示しています。
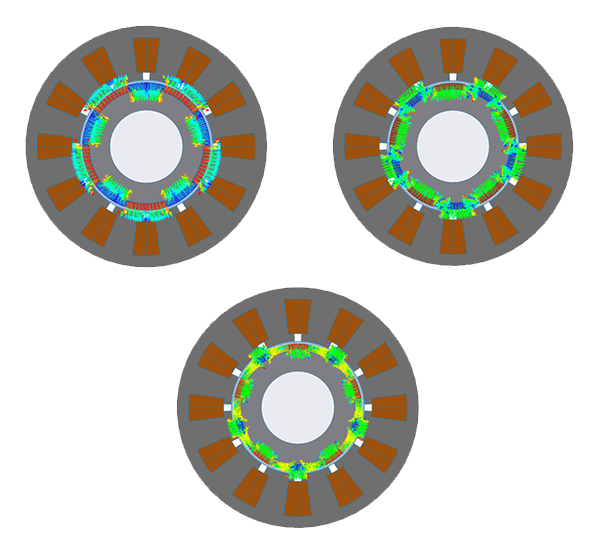
図 5- PM による磁束密度のベクトル プロット
図 6 では、各構成の逆起電力曲線を重ねて比較しています。明らかに、最小の Rmp 値の逆起電力は、従来の PM 設計および Rmp=0.8 のハルバッハ アレイ PM 設計と比較してより正弦波的です。
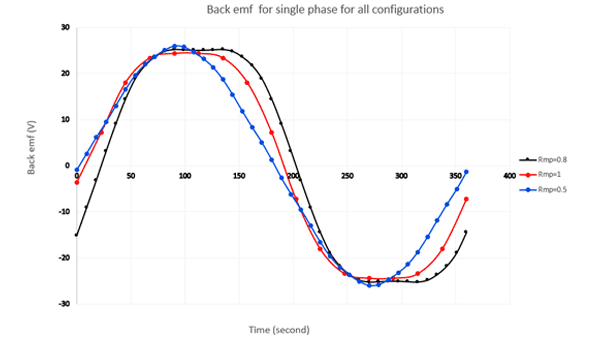
図 6 - 3 つの構成すべての時間に対する逆起電力の変動
負荷解析
シミュレーション結果の 2 番目の部分は負荷試験専用で、50 Hz の周波数で巻線に 3 相正弦波電圧励起を使用した機械のトルク生成能力が示されています。
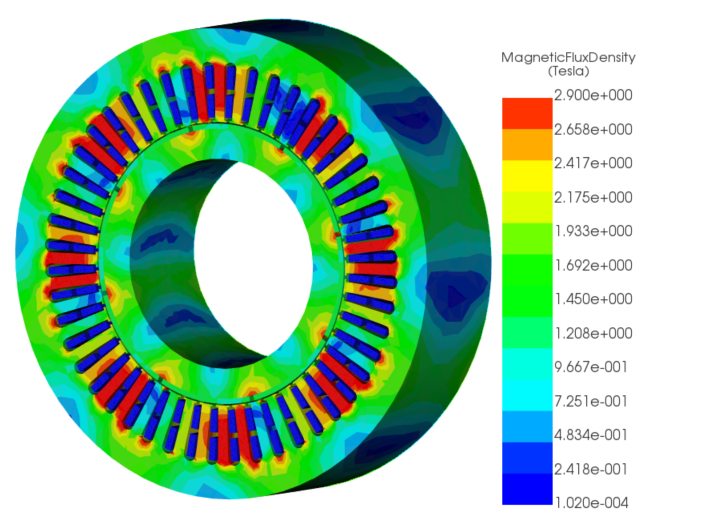
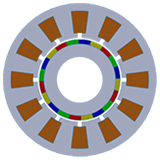
時間に対する磁束密度のアニメーション プロットを、各構成について以下に示します。
図 7- Rmp=1、0.8、0.5 の時間に対する磁束密度のアニメーション
図 8 は、さまざまな機械設計間の負荷時の電磁トルクの比較を示しています。Rmp=0.8 の PM 設計は、残りの構成と比較して最大のトルクを示しています。さらに、0.5 比率のトルクが最小のトルクを示すため、磁石比率とモーター トルクの関係は線形ではないことに注意することが重要です。
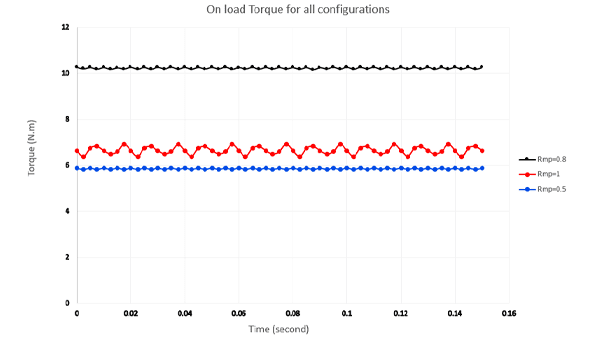
図 8- Rmp=1、0.8、0.5 の負荷時の電磁トルクと時間の比較
結論
次の表は、各 PM モーター構成で得られたシミュレーション結果をまとめたものです。同じ量の PM 体積と同じ基本速度の場合、0.8 の磁石比を持つハルバッハPM 構成が最高の平均電磁トルクとトルク密度を示すと結論付けることができます。得られた結果は、電磁トルクのハルバッハ PM モーター設計の最適化プロセスが磁石比に対して線形でないことを示しています。
 |  |  | |
|---|---|---|---|
| パラメータ | 回転数=1 | 回転数=0.8 | 回転数=0.5 |
| トルク (Nm) | 6.65 | 10.1 | 5.85 |
| 速度 Ns (rpm) | 400 | 400 | 400 |
| 電力 (ワット) | 278.55 | 423.07 | 245 |
| トルク密度 (kN・m/m 3 ) | 9.478 | 14.395 | 8.337 |