問題の説明
永久磁石同期機 (PMSM) は、トヨタのプリウスなど、定常運転、高効率、トルク密度が必要とされるトラクション アプリケーションや電気自動車で広く使用されています。
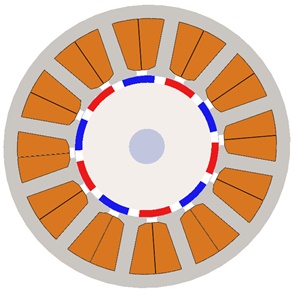
このアプリケーション ノートでは、[1] のサーフェス マウント PMSM のコギング トルクが計算され、SOLIDWORKS 内の EMWorks2D ソフトウェアを使用して検証されます。図 1 は、SOLIDWORKS を使用して設計された検討対象のモーターの 2D モデルを示しています。次に、PM のセグメンテーションがコギング トルクに与える影響を、SOLIDWORKS の「マルチ コンフィギュレーション」機能を使用して検討します。
シミュレーションと結果
1- 元のモデルの無負荷解析
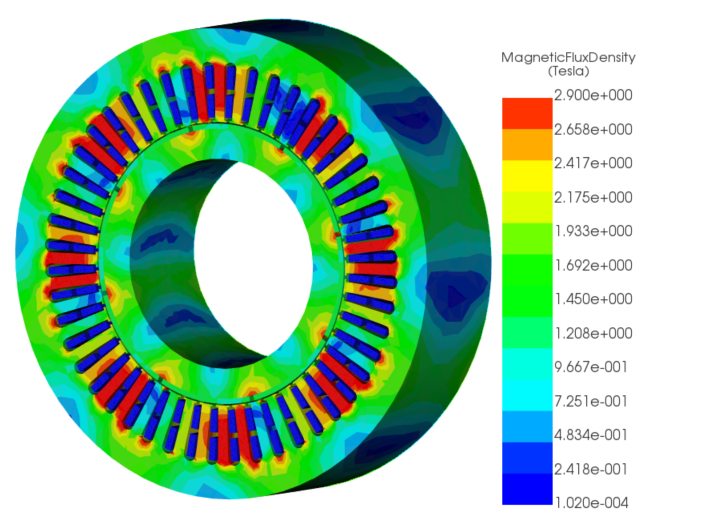
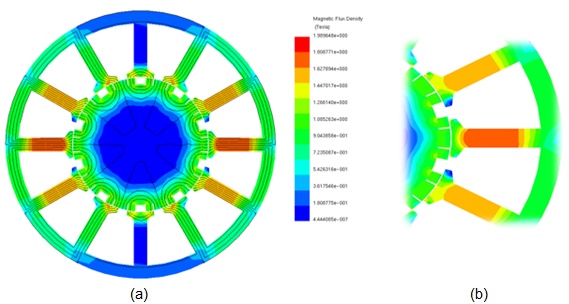
元の PMSM の磁場マッピング:元の表面実装 PMSM モーターの磁場マッピングは、図 2 に示すように、SOLIDWORKS 内の EMWorks2D を使用して、0 度の初期角度位置でシミュレートされます。
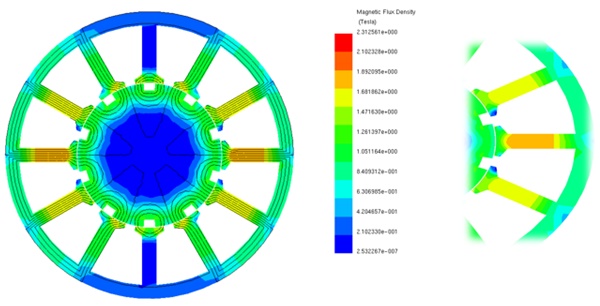
上の図を考慮すると、固定子の歯が磁極全体に面しているときに磁場が最大になることがわかります。
元の PMSM のコギング トルク: 1 周期にわたる角度の角度位置に対するコギング トルクは、SOLIDWORKS 内の EMWorks2D を使用して計算されます。図 4 に示すように、この結果は検証済みです。
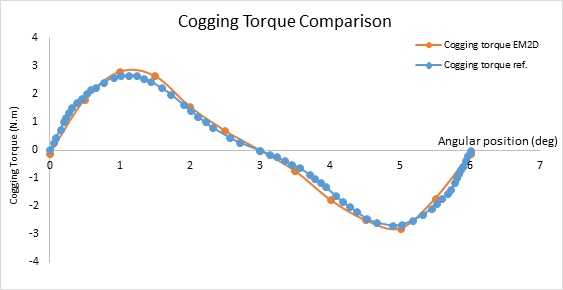
オリジナル PMSM のコギングトルクは、ピークツーピーク値 5.58Nm、平均値 -0.0185Nm です。
2- PMSM のコギング トルクに対する磁石のセグメンテーションの影響
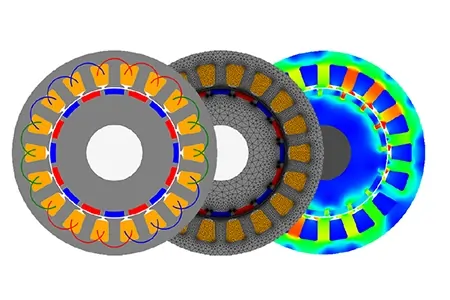
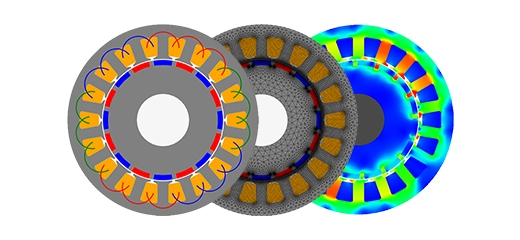
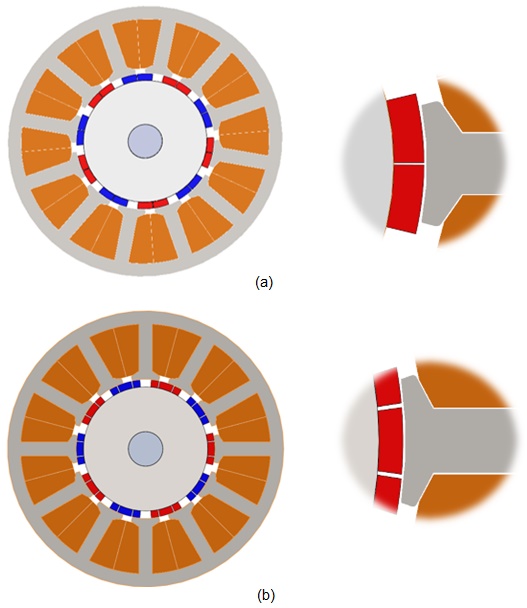
図 5 に示すように、SOLIDWORKS 内の EMWorks2D を使用して、無負荷トルクに対する磁石のセグメンテーションの影響を調査するために、2 つのケース スタディが実行されました。
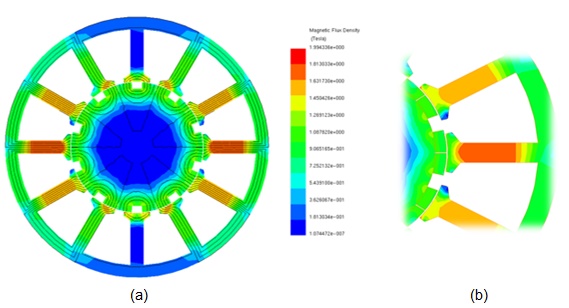
セグメント化された PMSM の磁場マッピング: PM の 1 つおよび 2 つのセグメント化を有する PMSM の磁場マッピングは、それぞれ図 6 および 7 に示されています。
セグメント化された PMSM のコギング トルク: コギング トルクは、図 8 に示すように、EMWorks2D を使用してさまざまなセグメンテーション ケースで計算されます。値を表 1 に示します。
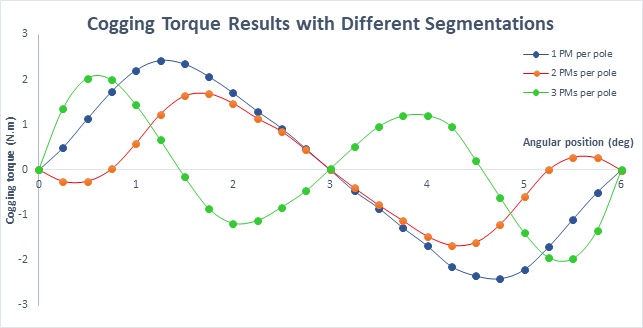
| コギングトルク | 極ごとに午後 1 時 | 極ごとに 2 PM | 極ごとに 3 PM |
| ピーク・ツー・ピーク値 ( Nm) | 5.4629 | 3.355 | 3.99478 |
| 平均値( Nm) | 0.01486 | 0.011802 | 0.029759 |
表 1 を考慮すると、コギング トルクの平均値はほとんど0であると推測できます。 3 つの構成の違いは、計算エラーによって説明できます。
極ごとに 2 つの PM を持つ 2 番目の構成を考慮すると、コギング トルクのピーク・ツー・ピーク値が大幅に減少します。一方、3 番目の構成ではわずかに増加しています。
まとめ
表 1 に示すように、磁石のセグメンテーション手法を使用して、コギング トルクのピーク・ツー・ピーク値を減らすことができます。ただし、この手法をランダムに実行すると、コギング トルクを減少させるのではなく、増加させる可能性があります。したがって、コギング トルクのピーク・ツー・ピーク値を最小化するには、セグメンテーション角度の最適化が必要です。
参考文献
[1] A. Frikha, “Contribution to the Multiphysics Modelling of Permanent Magnet Synchronous Machines”, Master Thesis, National Engineering School of Sfax, Tunisia, 2019.