リニアスイッチトリラクタンスモーター
リニアアクチュエーターには、家庭用から産業用まで、多くの用途があります。それらの役割は、電気エネルギー、油圧エネルギーなどの多くの形態のエネルギーを機械的な直線運動に変換することです。したがって、これらのアクチュエータは、変換されたエネルギーに応じて、油圧アクチュエータ、空気圧アクチュエータ、および電気/磁気アクチュエータに分類できます。広く使用された後、製造業やロボットシステムでは、油圧式および空圧式ドライブが電動リニアアクチュエーターに置き換えられています。これは、力がより安定し、正確で制御可能であり、エネルギー効率が高く、補助的な機械駆動が不要であるためです。この文脈では、リニア同期および誘導ドライブと比較して、リニアスイッチトリラクタンスモータが産業用ドライブシステムとして好まれています。したがって、リニア SRM は、主に位置制御を行うことで、この精度の問題を解決します。革新的な半導体技術は、可変リラクタンス マシンの大規模な研究開発を開始するのに役立った主な要因でした。従来の回転式スイッチトリラクタンスモータ用に開発された解析ツールをリニアスイッチ式リラクタンスモータに採用。有限要素法は、リニア スイッチトリラクタンス モーターを解析、設計、および最適化するための強力な手法です。より高い力密度、より滑らかな力曲線、およびより低いリップルを備えたモーターの開発に役立ちます。
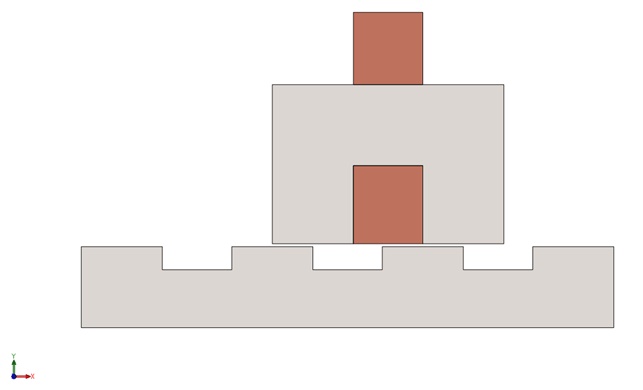
スイッチトリラクタンスモーター (リニアおよびロータリー) は、シンプルで堅牢、メンテナンスフリーの構造が特徴です。モーターの巻線は固定子の極に重ねられていますが、回転子は単に突出した鋼鉄の極でできています (図 1)。これは、リラクタンス トルク/力の原理に基づいて動作します。固定子巻線電流のオンとオフを切り替えて、回転子と固定子によって形成される磁気回路を変更します。固定子極は、その相電流をオンにすることによって通電されます。
固定子と回転子の磁極が整列していない場合、モーターの磁気抵抗は高くなります。したがって、回転子は、磁気回路の磁気抵抗を最小限に抑える、励磁された固定子極と整列する傾向があります。
固定子巻線の転流は、回転子の極が近づいたときに固定子の極が励磁されるように、正確にタイミングを合わせる必要があります。整流を制御するために必要な位置フィードバックを得るために、エンコーダまたはホール効果センサが使用されます。
![典型的なリニア スイッチド リラクタンス モーターの構造 [2]](/ckfinder/userfiles/images/Typical-linear-switched-reluctance-motor-structure.jpg)
図 1 -典型的なリニア スイッチトリラクタンス モーターの構造 [2]
この記事では、リニア スイッチトリラクタンス モーターの例の 2D および 3D 電磁シミュレーションの両方が使用されます。磁場、インダクタンス、および力の結果が計算され、基準と比較されます。
縦方向リニア スイッチ リラクタンス モーター
図 2 は、縦方向のリニア スイッチトリラクタンス モーターの 2D ジオメトリを示しています [3]。トランスレーターとステーターの両方が steel 1008 でできています。高い磁場飽和値が特徴です。234巻きのより線コイルは銅製です。シミュレーション中、x 軸に沿った軸力は、さまざまなトランスレータ位置と現在の大きさで計算されます。インダクタンスの結果も計算されます。
このモデルは軸不変ジオメトリを表すため、精度を損なうことなく 2D シミュレーションを使用できます。パラメトリック スイープ解析は、EMWorks2D で実行されます。
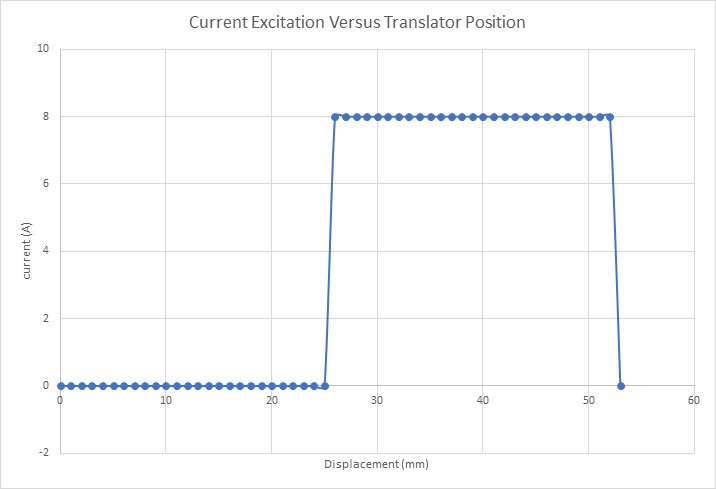
励磁電流波形を下図に示します。シミュレーションは、同じ電流波形、異なる大きさ、およびさまざまなトランスレータ位置で確立されます。調査対象のモーターの変位定数は 52mm です。
結果
EMWorks2D のパラメータ化スタディを使用して、すべてのトランスレータ位置の 2D 静磁場結果が生成されます。図 4a) は、位置合わせされていない位置 (26mm) と 8A の励磁での磁束密度を示しています。約 2T の磁束密度の高いスポットがトランスレータとステータの極に見られます。青色は、0.55T 未満のフィールド値を表すモデルのほとんどの領域をカバーしています。この位置で磁気抵抗が最大になります。図 4b) は、同じ励磁電流で 52mm の位置合わせされた位置での磁束密度のプロットを含みます。この位置では、磁場はモーター モデルのより広い領域ではるかに高くなります。磁場は主に 0.6T と 1.66T の間の値です。この位置は、磁気抵抗が最小であるという特徴があります。位置合わせされていない位置から位置合わせされた位置へのトランスレータの変位のアニメーションを図 5 に示します。
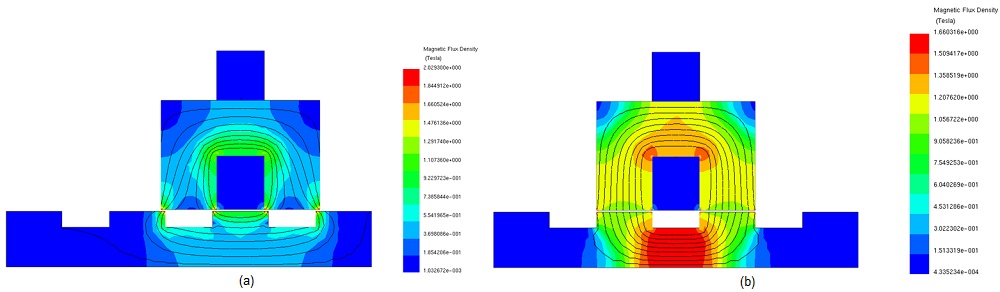
位置合わせされていない位置から位置合わせされた位置へのトランスレータの変位のアニメーションを図 5 に示します。
図 5 -磁束のアニメーション (5A)
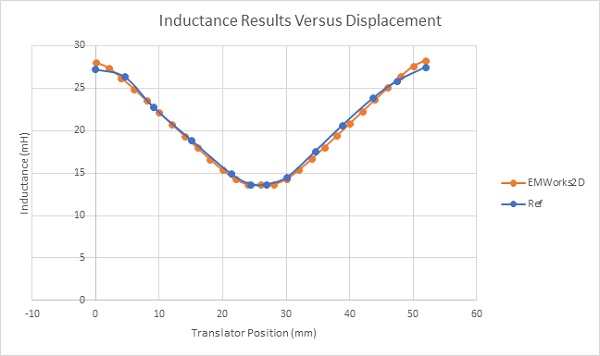
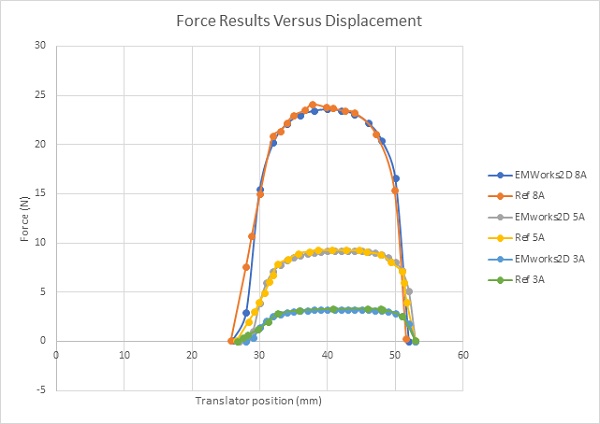
図 6 は、2 つの位置合わせされた位置 (0 と 52 mm) 間の変換器の変位に対する 2D インダクタンスの結果を示しています。インダクタンスは両方の整列位置で最大 (28mH) です。これは、前述のように、これらの位置で磁気抵抗が低いためです。整列位置とは異なり、この位置で磁気抵抗が最大に達するため、整列されていないインダクタンスは最小値 (13.66 mH) になります。図 7 には、さまざまな DC 電流でのトランスレータの動きに対する力の結果の x 成分が含まれています。力の結果は、異なる加振に対して同じように動作します。最初はゼロで、励起をオンにした後、力は整列していない位置から増加し始めます。 40mm (8A) で 24N のピーク値まで上昇し続けます。力はピークから減少し、整列位置 (52mm) で0になります。リニアSRM 力の高い値は、非整列位置と整列位置 (非重複位置と完全な状態の重複位置) の間に位置する部分的な重複位置で達成されます。図 6 と図 7 の両方が、EMWorks2D と参考文献 [3]、[4] の良好な一致を示しています。
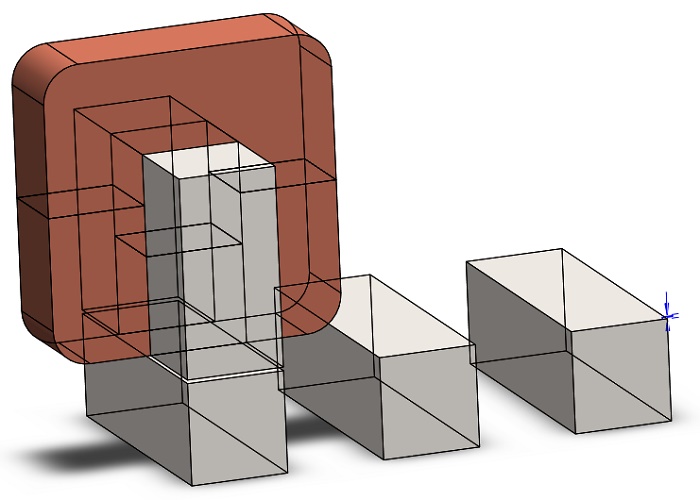
横方向リニア スイッチトリラクタンス モーターこのセクションでは、3D 電磁シミュレーション ソフトウェアである EMS を使用して、横方向リニア スイッチトリラクタンス モーターを調べます。シミュレートされたモデルの SOLIDWORKS 3D CAD モデルを図 8 に示します。この例では、前のスタディと同じ材料とコイル設定が使用されています。
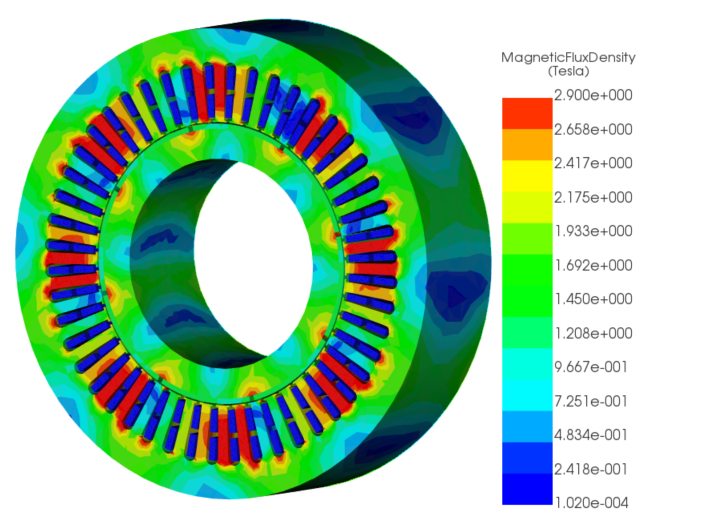
モータの磁束密度は、それぞれ図 9a と図 9b の整列されていない位置と整列された位置に示されています。縦方向と横方向の両方のリニア スイッチトリラクタンス モーターが同じ動作原理を持っているため、これらの図から上記の同じ解釈を抽出できます。
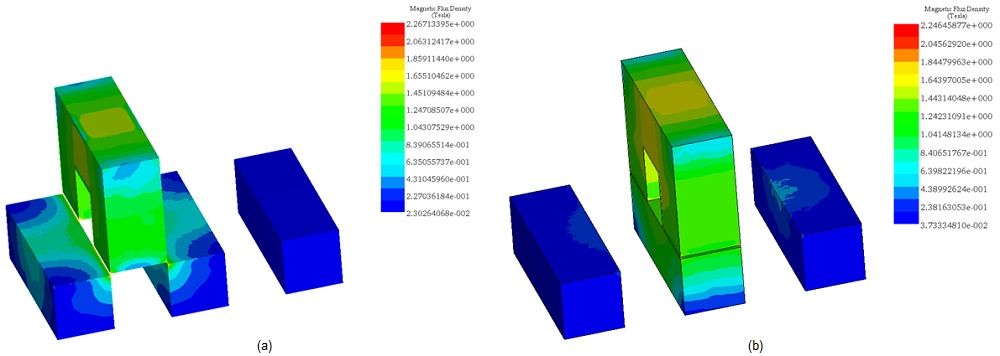
図 10 -磁場ベクトル プロットのアニメーション
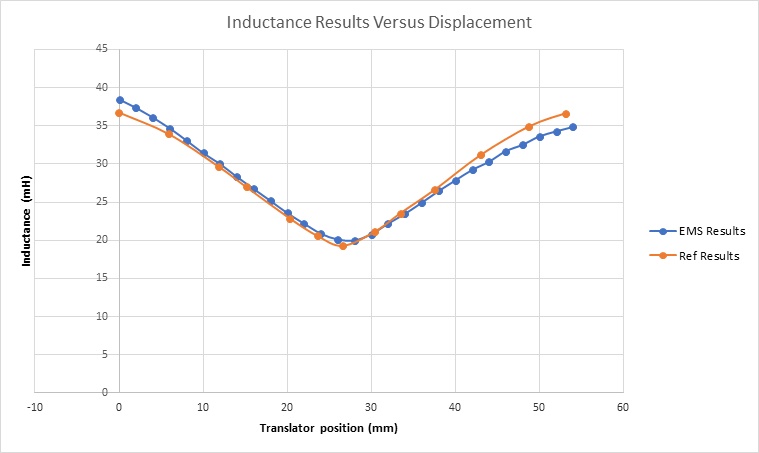
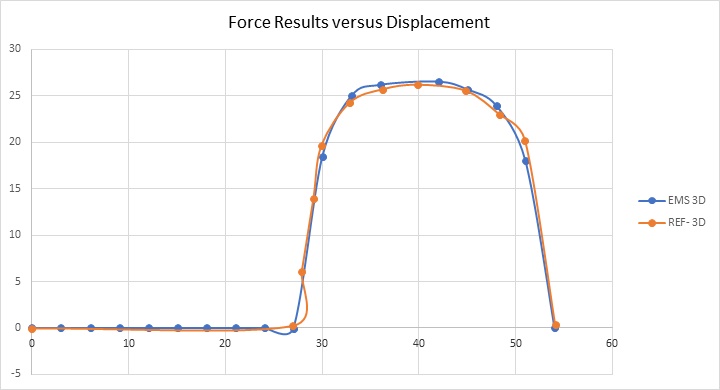
図 11 は、トランスレータの変位に対する横方向 LSRM のインダクタンスの結果を示しています。機械の磁気抵抗が最小であるため、インダクタンス曲線が整列した位置に 2 つのピーク値を持つことがわかります。逆に、磁気抵抗が非整列位置で最大になると、インダクタンスは最小になります。図 12 には、8A での磁気抵抗力の x 成分が含まれています。 27 mm で上昇し始め、[30, 50 mm] の変位間隔で 20 N から 26 N までの最大値に達し、最後に 54 mm で再びゼロになります。
横方向リニア スイッチ リラクタンス モーター (26.3N) によって生成される最大力は、縦方向リニア スイッチ リラクタンス モーターよりも大きくなります。したがって、より高い力密度を生み出すため、横方向の機械が好ましい。
縦方向と横方向のスイッチ式リラクタンス モーターの比較縦方向と横方向のスイッチ式リラクタンス モーターの平均力は、次の式 [2]、[3] を使用して計算されます。
約 10.28N である横方向に切り替えられたリラクタンス モーターの平均力は、約 8.35N である縦方向に切り替えられたリラクタンス モーターの平均力よりも高い。したがって、横方向の機械は、縦方向の機械よりも高い力密度を生み出します。ただし、縦型構造は固定子に必要な鋼が少ないため、経済的な機械です [4]。
結論
この例では、EMWorks 2D および EMS 3D 電磁シミュレーション ツールを使用して、リニア スイッチトリラクタンス モーターの 2 つの異なるトポロジを解析しました。磁束、インダクタンス、および磁気抵抗の静的な結果が計算され、参照結果で検証されます。 2D と 3D の両方の FEM シミュレーションで、正確な結果を生成する優れた機能が実証されました。これにより、エンジニアは、エア ギャップなどの多くの基準を最適化することで、高効率のリニア スイッチトリラクタンス モーターを構築できます。 SRM は固定子と回転子の引力 - 反発力の原理を使用するため、固定子と回転子の歯の間のエア ギャップ表面が小さくなると、力密度が増加します。ただし、これは強力なフラックス ラインによりラジアル プルが大きくなり、それによってトルクリップルが大きくなります。この問題を克服するために、両面リニア スイッチ リラクタンスが開発されました。
参考文献
[1] J Corda and E Skopljak. Linear switched reluctance actuator. In Electrical Machines and Drives, 1993. Sixth International Conference on, pages 535–539. IET, 1993.
[2] R. Krishnan. RELUCTANCE MOTOR DRIVES. IEEE The Bradley Department of Electrical and Computer Engineering Fellow, Center for Organizational and Technological Advancement (COTA) Virginia Tech, Blacksburg, Virginia
[3] S.Darabi, M.Ardebili. Analysis of Linear Switched Reluctance Motor with Longitudinal Flux Linkage Using 2D-FEM Compared to 3D-FEM. Department of Elec. Eng. K.N.Toosi University of Technology K.N.Toosi University of Technology, KNTU Tehran, Iran. 2011 2nd Power Electronics, Drive Systems and Technologies Conference
[4] Saeed Darabi, Yousef Alinejad Beromi, and Hamid Reza Izadfar. Comparison of Two Common Configurations of LSRM: Transverse Flux and Longitudinal Flux. Dept. of Elec. & Comp. Eng. Semnan University Semnan, Iran. 2012 International Conference and Exposition on Electrical and Power Engineering (EPE 2012), 25-27 October, Iasi, Romania