問題の説明
この例では、Autodesk Inventor 内で EMS を使用した、図 1 に示す 6/4 スイッチトリラクタンス モーターの解析スタディを示します。表 1 に、調査対象の SRM の寸法を示します [1]。固定子コアと回転子コアはどちらも無配向 M-19 ケイ素鋼でできています。 4 相巻線は銅でできており、各巻線は 1 コイルあたり 120 巻きです。電磁トルクを計算するために、パラメトリック スタディが定義されました。この検討では、1 つの回転子極の周りで 1 つの固定子相によって生成されるトルクが計算されました。したがって、スイッチトリラクタンス モーターの回は、非整列位置 (0 度) から整列位置 (46 度) まで合計 46 度変位しました。

| 回転子極数 | 4 |
| 固定子外コア径 | 72mm |
| 回転子コア外径 | 40.5mm |
| エアギャップ長 | 0.25mm |
| 回転子極アーク | 32度 |
| 固定子極アーク | 28度 |
| モーターの長さ | 36mm |
| シャフトの直径 | 10mm |
結果
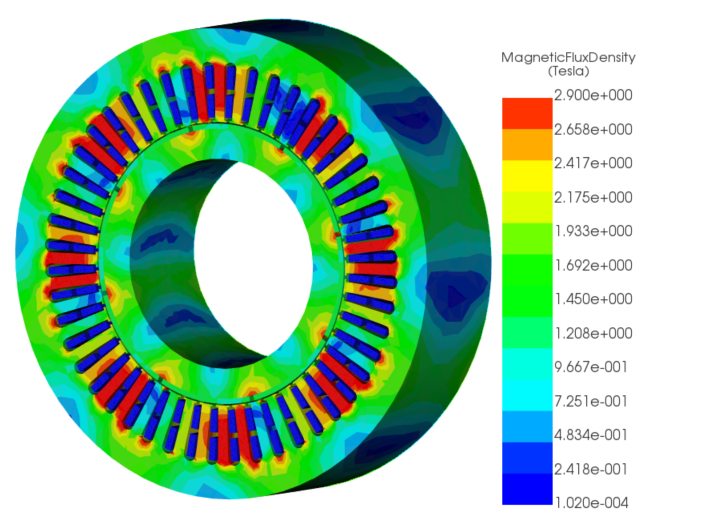
以下の図は、異なる回転子角度で回転子コアと固定子コアの両方で生成される磁場を示しています。コンタープロットとベクトル プロットを使用して、さまざまな回転子位置での磁束の挙動を示します。図 2a) と 3a) は、それぞれ、回転子の位置合わせされていない位置 (0 度) でのコンターとベクトル プロットを含みます。この位置は、磁気抵抗が高いという特徴があります。この位置で、磁束は最も近い 2 つの隣接する回転子極を通って回転子コアに到達しようとします。したがって、この位置で発生する電磁トルクはほぼゼロに等しくなります。
18 度の回転子位置での磁場のフリンジとベクトル プロットを、それぞれ図 2a) と 3a) に示します。この位置で、磁束は回転子から固定子極への閉じた経路をたどり始めます。したがって、最高のトルクを生成します。位置合わせされた位置 (46 度) のコンターとベクトル プロットの結果を、それぞれ図 2c) と 3c) に示します。位置合わせされた位置では、磁気抵抗とトルクの値は最小になります。これは、固定子と回転子の両方の極が反対方向にあるためです。


図 4 は、回転子角度に対するトルク曲線を示しています。図 4 に示すように、トルクは非整列 (0 度) で0から上昇し、18 度から 40 度の間で最大値に達し、整列位置 (46 度) でゼロに戻ります。トルクのピーク値は 18 度で測定され、0.30 Nm (概算) に等しいことがわかります。

したがって、リラクタンス トルクは巻線電流に正比例します。図 5 は、巻線電流のさまざまな値でのトルクのプロットを示しています。

まとめ
Autodesk Inventor の EMS は、このアプリケーションで 6/4 スイッチ リラクタンス モーターを解析するために使用されました。磁場とトルクの結果は、EMS 静磁モジュールのパラメトリック研究を使用して、回転子角度に対して計算されました。この記事の最後で、励起電流を変化させて、電流レートに対するさまざまなトルク曲線を作成しました。アプリケーション ノートの詳細については、www.emworks.com をご覧ください。